

This design project simulates and controls a beam and ball system. A ball rolls on a pivoting beam. The beam is connected through DC motor through a linkage arm. The objective is to create an output feedback control system. The project simulates the system using Matlab and Simulink.
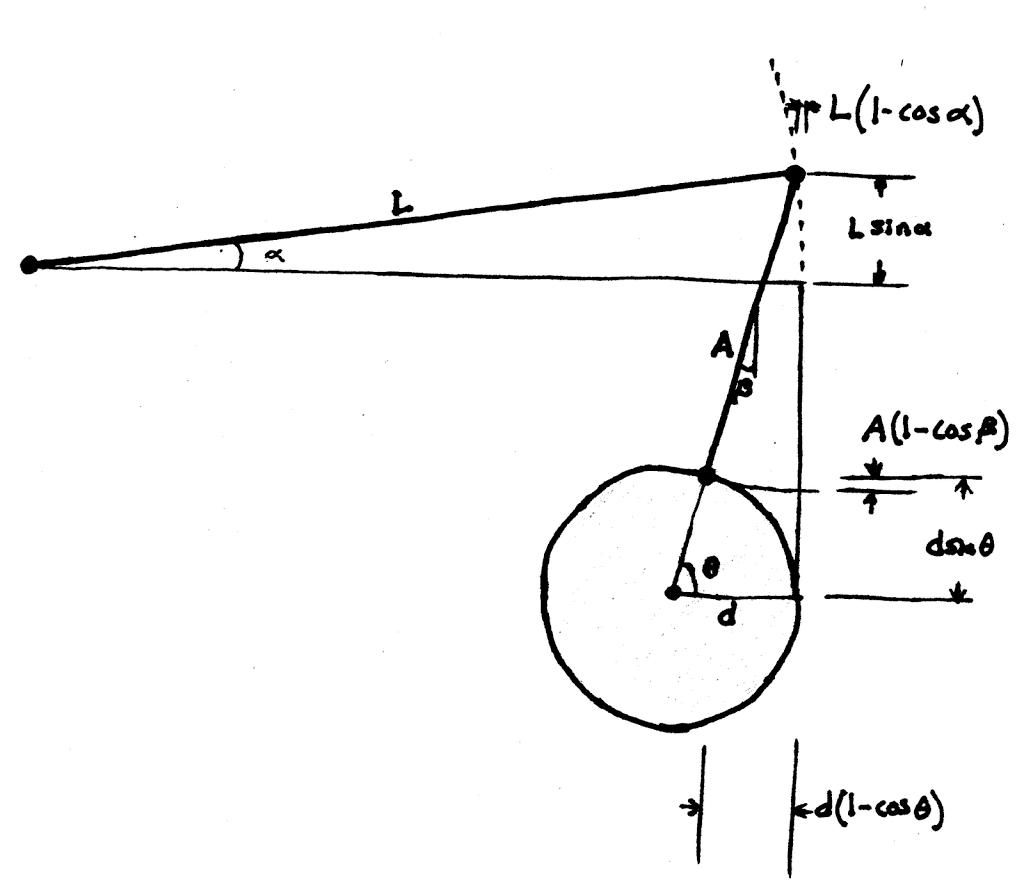 |
| Ball and beam geometry |
The physical system consists of coupled linkages and a free-to-roll ball. The linkage motion is nonlinearly coupled to the gear angle. The beam has a length of 1 meter. The gear arm has a radius of 0.03 meters, and the linking arm has a length of 0.2 meters. The ball is steel with a radius of 15 millimeters. The system has 2 energy storage components: beam inertia and ball inertia. System control is allowed through a voltage input into the DC motor, which provides a torque applied at the gear arm. The gear arm motion is harmonic; the gear can go past topdead-center in the straight up and down positions.
The document is available here.